Endoskopische Prostataoperation mit erster menschenähnlichen Attrappe gelungen

Stuttgart/Freiburg – Angehende Piloten trainieren viele hundert Stunden in einem Flugsimulator, bevor sie in ein echtes Flugzeug fliegen dürfen. Im Gegensatz dazu haben Chirurgen nur sehr begrenzten Zugang zu Simulatoren; und die, die es gibt, bieten keine ausreichend realistischen Bedingungen. Um das Training von Chirurgen zu optimieren und Ergebnisse quantitativ messbar zu machen, haben Grundlagenforscher des Max-Planck-Instituts für Intelligente Systeme und der Universität Stuttgart das erste Organmodell entwickelt, mit dem Chirurgen eine realistische transurethrale Resektion der Prostata simulieren können. Die Attrappe besteht dabei aus Materialien, die sich wie echtes Gewebe verhalten.
Sie gaben die Attrappe einem Ärzteteam der Urologie des Universitätsklinikums Freiburg, das mit der gleichen Ausrüstung, mit der solche Eingriffe normalerweise vorgenommen werden, am Prostatamodell operierte. Dank der Attrappe konnten die Wissenschaftler zudem das Ergebnis der Operation deutlich visualisieren (siehe Abbildung), was bei echten Patienten unmöglich ist. Die Wissenschaftler haben nämlich ein automatisiertes Bewertungssystem entwickelt, um angehenden Chirurgen unmittelbar nach dem Training Feedback zu geben.
80% aller Männer leiden irgendwann an der Vergrößerung der Prostata, der so genannten gutartigen Prostatahyperplasie (BPH). Die BPH kann operativ behandelt werden, am häufigsten in einem minimal-invasiven Verfahren, der sogenannten transurethralen Resektion der Prostata (TURP). TURP ist ein chirurgischer Eingriff, bei der die Prostata über die Harnröhre (Urethra) komplett oder teilweise entfernt wird. Während der Operation wird ein starres Endoskop durch die Harnröhre des Patienten eingeführt. Mittels einer sogenannten elektrischen Hochfrequenz-Schlinge durchtrennt der Chirurg das Gewebe und verödet gleichzeitig die Schnittstellen. Während das Innere der Prostata entfernt wird, muss die periphere Zone erhalten bleiben. Ein erfahrener Chirurg ist in der Lage, die inneren und äußeren Zonen anhand der taktilen Rückmeldung des Endoskops und dem Aussehen des Gewebes zu unterscheiden. Die Aneignung dieser Fähigkeit erfordert jedoch viel Übung. Die neue Prostata-Attrappe kann helfen, wertvolle Erfahrung zu sammeln: An ihr kann der Chirurg lernen, ohne das Risiko einzugehen, einen Fehler bei einem Patienten zu machen.
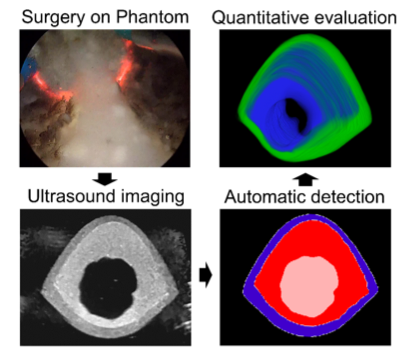
Abbildung: Endoskopie einer menschenähnlichen Prostata-Attrappe. Der intelligente Operationssimulator ermöglicht es erstmals, das Ergebnis der Operation quantitativ zu bewerten. Bildnachweis: E. Choi/MPI-IS.
Das realistische Modell wurde im 3D-Druck hergestellt und anschließend modelliert. Die Forscher verwendeten dafür spezielle biomimetische Materialien, um die richtige Festigkeit, ein realitätsgetreues Aussehen und Interaktion mit dem Operationsbesteck zu gewährleisten. Darüber hinaus fügten die Forscher bildgebende Kontrastmittel hinzu, die erst nach der Operation die beiden verschiedenen Zonen sichtbar machten. Dadurch kann der Chirurg erstmals eine Rückmeldung über die Genauigkeit der Resektion erhalten
„Das künstliche Organ fühlt sich sehr realistisch an, die Operation fühlt sich an wie eine an einem echten Patienten," sagt Professor Arkadiusz Miernik, Oberarzt für Urologie und Sektionsleiter Urotechnologie am Universitätsklinikum Freiburg. „Ich bin mir sicher, solch ein Modell wird die chirurgische Ausbildung verändern. Im Vergleich zu Kadaver- oder Tiermodellen ist es wesentlich angenehmer in der Handhabung, spart Zeit und Geld und kann für spezielle Verfahren ausgelegt werden. Und es liefert wertvolles Feedback, wie man seine chirurgischen Fähigkeiten verbessern kann."
Das Forscherteam um Tian Qiu, Leiter der Cyber Valley Forschungsgruppe „Biomedizinische Mikrosysteme“ an der Universität Stuttgart, und Peer Fischer, Professor für Physikalische Chemie an der Universität Stuttgart und Leiter des „Mikro, Nano und Molekulare Systeme“ Labors am Max-Planck-Institut für Intelligente Systeme in Stuttgart, entwickeln noch weitere Organmodelle. Sie wollen damit auch andere chirurgische Verfahren, einschließlich neuer Roboteroperationen, optimieren und systematisch validieren. Ihr oberstes Ziel ist es, einen umfassenden und realistischen chirurgischen Simulator zu entwickeln.
Publikation
Eunjin Choi, Fabian Adams, Stefano Palagi, Anina Gengenbacher, Daniel Schlager, Philippe-Fabian Müller, Christian Gratzke, Arkadiusz Miernik, Peer Fischer, Tian Qiu. A High-Fidelity Phantom for the Simulation and Quantitative Evaluation of Transurethral Resection of the Prostate. Annals Biomedical Engineering (2019). https://doi.org/10.1007/s10439-019-02361-7
Contact
Dr. Tian Qiu
Cyber Valley Group Leader
University of Stuttgart
Pfaffenwaldring 55, 70569 Stuttgart, Germany
Tel: +49 (0) 711 685 64482
Email: tian.qiu@ipc.uni-stuttgart.de
Zugehörige Artikel

Pierre Schumacher receives RIG “Outstanding Doctoral Thes...

Cyber Valley Start-up Meshcapade draws Epic Games to Tübi...
